OUR RESEARCH
Our lab is a part of the NC State & UNC Joint Department of Biomedical Engineering and the Closed Loop Engineering for Advanced Rehabilitation (CLEAR) program.
Check out some of our select projects below!
Assistive Control Algorithms for Standing and Walking
This project focuses on developing advanced control strategies for hybrid neuroprostheses that integrate functional electrical stimulation (FES) with powered exoskeletons. The goal is to assist individuals with spinal cord injuries (SCI), multiple sclerosis, post-stroke gait impairments, and other neuromuscular injuries in regaining mobility for standing and walking. Two major subprojects are:
Adaptive Hybrid Exoskeletons
The hybrid exoskeleton leverages the health benefits of FES with the fatigue-compensating capabilities of powered motors. Subject-specific muscle fatigue models, informed by real-time ultrasound imaging, enable dynamic adjustment of motor and FES control. Nonlinear controllers ensure system robustness, while synergy-based control reduces computational complexity by coordinating muscle activations and motor assistance. This approach optimizes performance and reduces muscle fatigue.
Ankle Rehabilition
Focused on improving ankle mobility and strength, this subproject employs NMPC to balance FES and motor assistance for dorsiflexion and plantarflexion. Real-time feedback from EMG and ultrasound sensors enhances control precision, addressing day-to-day variations in musculoskeletal dynamics. The system aims to correct walking abnormalities such as foot drop and improve stability during gait.
Ultrasound-Driven Intent Detection for Assistive Devices
This project uses ultrasound imaging to predict volitional muscle effort in individuals with incomplete SCI. Combining sonomyography with EMG data, the research team develops bioinspired neuromuscular models for more accurate control of assistive devices, such as exoskeletons. These models improve the precision of robotic assistance, promoting faster and safer recovery.

Ultrasound-Guided Tremor Suppression
To mitigate tremors associated with Parkinson’s disease and Essential Tremor, this project leverages ultrasound imaging for real-time monitoring of muscle dynamics. A closed-loop control system adjusts afferent nerve stimulation below the motor threshold, reducing tremor amplitude by up to 70%. The long-term objective is to create a wearable tremor suppression sleeve for daily use.
Advanced Wearable Sensor Technologies
Wearable sensors combining EMG and ultrasound technologies capture real-time muscle dynamics, offering an innovative solution for adaptive exoskeleton control. These sensors provide high-resolution feedback for predictive control algorithms, enabling assist-as-needed strategies that promote natural gait patterns and reduce user fatigue. The development of flexible, high-density ultrasound arrays enhances the system’s adaptability and performance.
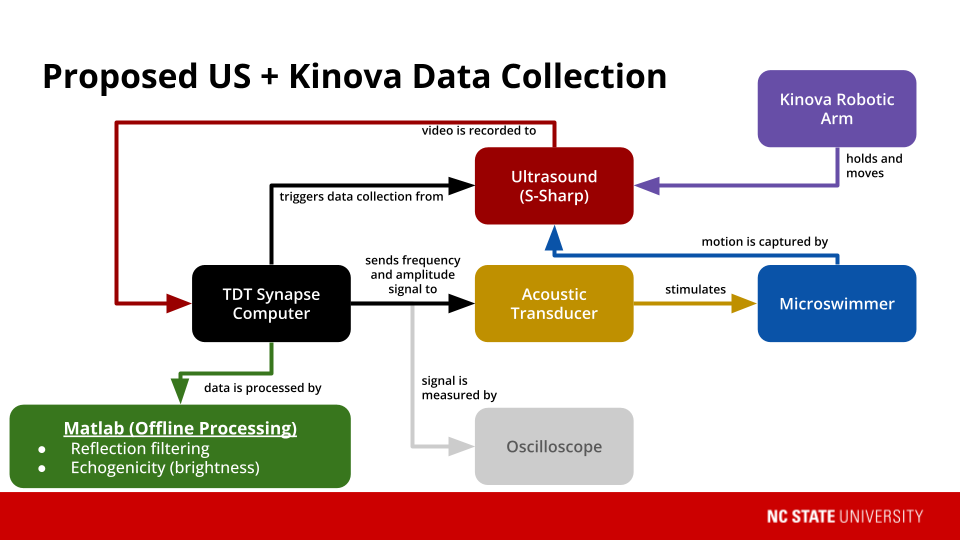
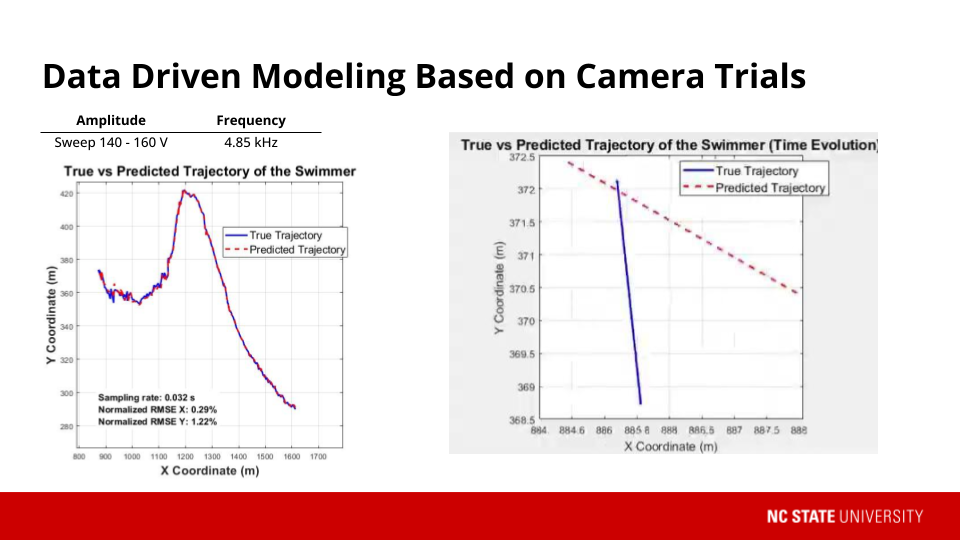
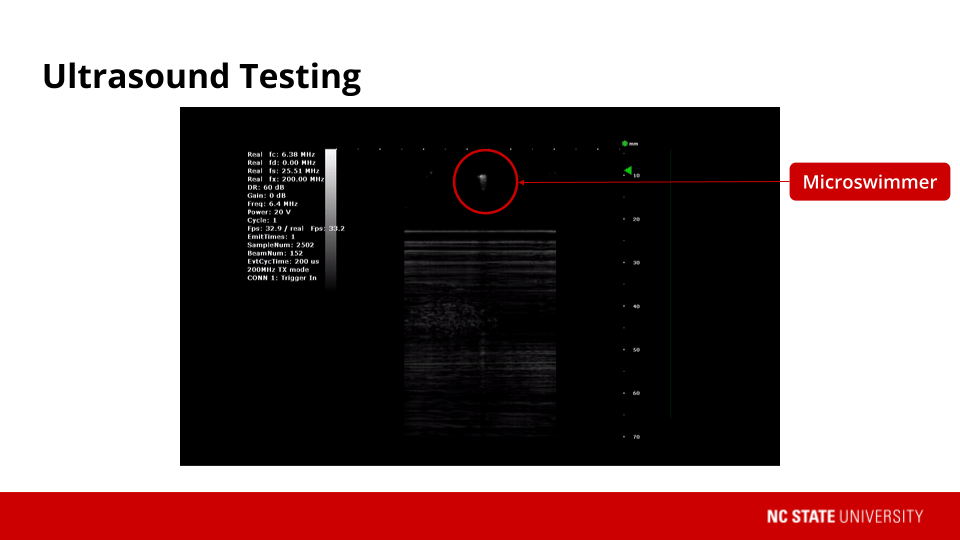
Acoustically Powered Microrobots for Targeted Therapies
The future of biomedical research includes more precise therapies, made possible through microrobots that navigate the body. This project explores the use of acoustically actuated microrobots for targeted neuromodulation. By navigating through bodily fluids, these microswimmers will be able to activate specific muscle fibers, mimicking natural activation patterns. Data-driven models and controllers ensure precise control, with potential applications in treating chronic pain, epilepsy, and neurodegenerative diseases.
Non-Invasive Neuromodulation in Animal Models
Through low-intensity focused ultrasound (LIFUS), this project investigates non-invasive methods for restoring limb function following neurological injuries. By combining LIFUS with spinal cord stimulation, researchers aim to access previously unreachable neural pathways, reducing spasticity and improving voluntary movement. This technique, currently being tested in anesthetized rats, has the potential to revolutionize neuromodulation therapies for mobility disorders.

Selective Muscle Activation with Implanted Electrodes
Implanted electrodes address the limitations of traditional FES by selectively activating specific muscle fibers, reducing fatigue, and improving rehabilitation potential. This project focuses on designing and optimizing electrode configurations for better force production and muscle recruitment. The goal is to develop a robust, long-term solution for neuroprosthetic interventions in individuals with SCI.
